衛(wèi)星地圖助力交通安全
今天,我們擁有技術(shù)來大幅減少街道上的事故和傷亡人數(shù)。映射,傳感器,定位,GPU處理,人工智能以及與我們的車輛兼容的安全系統(tǒng)在使乘客更安全方面取得了重大進展。但仍有改善的空間。
車輛安全中最大的挑戰(zhàn)之一是可靠的和實時更新的位置信息。首先導(dǎo)航系統(tǒng)必須具有非常詳細的實時環(huán)境底圖,它必須準確,可靠和可擴展以覆蓋車輛可行駛的所有道路和路線。該底圖是一個車輛需要安全導(dǎo)航并確定其在該地圖上的位置的所有線索的清單,這種現(xiàn)象稱為“本地化”。
這些系統(tǒng)需要接受培訓(xùn),與人類學習駕駛和安全駕駛時非常相似。當我們開車時,我們正在處理大量的信息和同時發(fā)生的事件。我們認為這是多么困難。培訓(xùn),學習和安全都始于底圖,該底圖是使用詳細測量創(chuàng)建的。

這些道路標記是自主車輛用于本地化的線索類型。借助遙感,我們可以創(chuàng)建所有這些功能的詳細清單或底圖。
我們都在DigitalGlobe收集的新聞中看到了令人驚嘆的圖像。事情就是這樣:這些都比漂亮的照片多得多。它們是由太空中非常復(fù)雜的衛(wèi)星進行測量的視覺表現(xiàn)。當你在新聞中看到一幅圖像時,它只會以這種方式看起來,因為它是以一種針對人眼球優(yōu)化的方法進行處理的。但是,這不是處理機器人圖像的最佳方式,例如自動駕駛汽車,或者在自動駕駛汽車上運行代碼的算法。
DigitalGlobe以高分辨率收集整個行星,有效地映射出地球上的每條道路。而現(xiàn)在,我們的目標是準確快速地更新它們。我們通過在太空中使用非常準確的傳感器來做到這一點我們的衛(wèi)星以17,000英里每小時的軌道繞地球運行。當他們收集數(shù)據(jù)時,他們正在考慮這個軌道速度,地球的旋轉(zhuǎn)和大氣折射。
使用衛(wèi)星平臺從空間收集和測量這個概念令人興奮。但是,像WorldView-3這樣的衛(wèi)星具有精確的技術(shù),這是可行的。事實證明,它具有令人難以置信的可擴展性和經(jīng)濟性。從太空看,這就是同樣的道路:
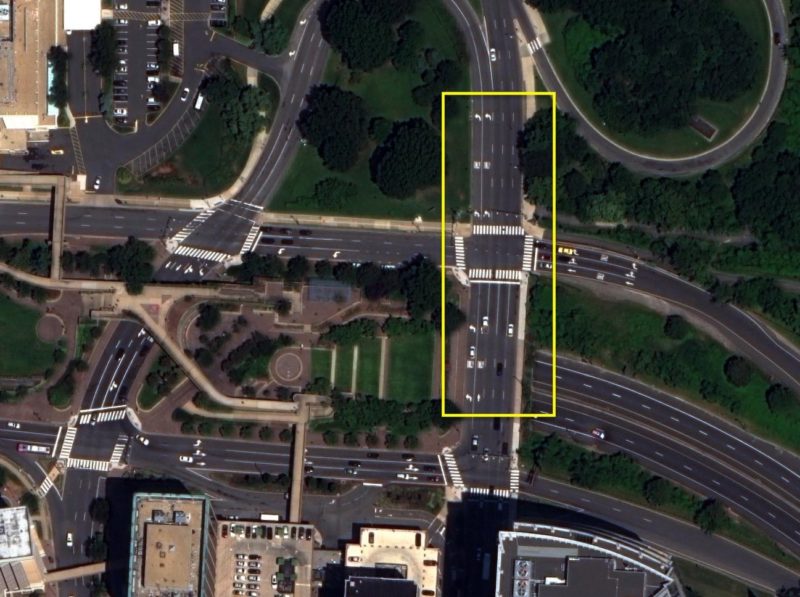
使用算法檢測和提取特征,我們可以從空間創(chuàng)建高清晰度地圖。為了說明,這里是另一個交點。

和我們開始提取道路特征時相同的路口:

這是一個全面,準確的底圖,可幫助車輛在導(dǎo)航過程中提供幫助。車輛上的傳感器將其定位在該地圖中,然后專注于尋找潛在的危險,例如其他車輛和行人。換句話說,這張高分辨率地圖是車輛“作弊”的一種方式,因此它可以專注于實時環(huán)境。
傳感器對他們可以檢測到的功能距離汽車有多遠有“視野”或限制。利用從高清地圖中提取的特征,車輛的傳感器可以看到超出地平線的位置,并預(yù)測街區(qū)周圍,鄰近街道甚至整個城鎮(zhèn)的道路標記。借助更智能的車輛,乘客和我們的社區(qū)更安全。我們不必因運輸系統(tǒng)的成本而解決死亡問題。

隨著這項技術(shù)的發(fā)展,世界將經(jīng)歷一次巨大的轉(zhuǎn)型 - 以商業(yè)創(chuàng)新為動力。 DigitalGlobe和我們的母公司Maxar Technologies期待著與汽車創(chuàng)新者合作,建立一個更美好的世界,因為自動駕駛汽車在我們的社區(qū)中變得越來越流行。
-完-
Bigemap GIS Office 國產(chǎn)基礎(chǔ)軟件
Bigemap GIS Office是一個全面且易于使用的國產(chǎn)化基礎(chǔ)軟件,為用戶提供數(shù)據(jù)處理、編輯、數(shù)據(jù)分析、集成以及可視化呈現(xiàn)的綜合數(shù)據(jù)集平臺。支持上百種數(shù)據(jù)格式:shp/kml/kmz/dwg/dxf/gpx/csv/excel/txt/tiff/geotiff/osgb/mbtiles/tiles等,對數(shù)據(jù)流轉(zhuǎn)、嵌入、融合、以及更多地為用戶提供數(shù)據(jù)的增強處理及多種分析工具。在不同場景不同行業(yè)下支持坐標系轉(zhuǎn)換CGCS2000/WGS84/Xi’an80/Beijing54/UTM等多種投影互轉(zhuǎn)互換、支持專題地圖、大數(shù)據(jù)加載、航拍影像、矢量數(shù)據(jù)、柵格數(shù)據(jù)的導(dǎo)入導(dǎo)出、瓦片切片及地圖服務(wù)發(fā)布。
了解詳情>>